InteriorGS – A High-Quality 3D Gaussian Semantic Dataset Released by Kujiale (Coohom)
What is InteriorGS?
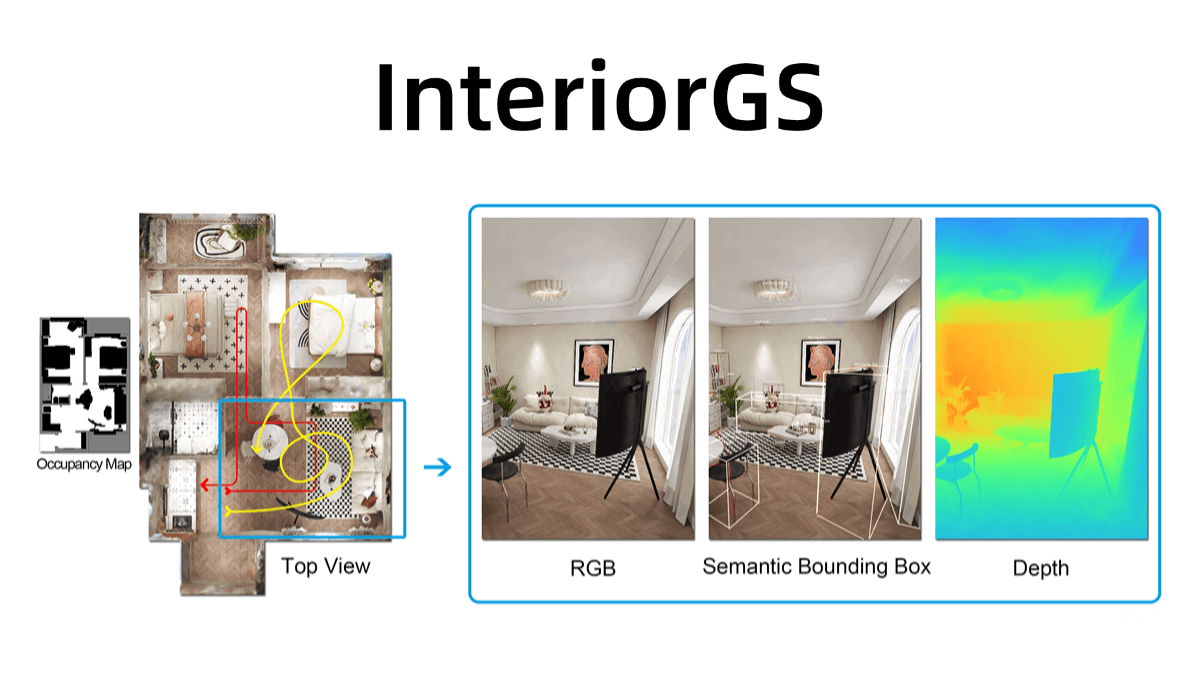
InteriorGS is a high-quality 3D Gaussian semantic dataset released by Kujiale (Coohom). It includes 1,000 3D Gaussian semantic scenes covering over 80 types of indoor environments, such as homes, convenience stores, wedding halls, and museums. The dataset contains over 554,000 object instances across 755 categories, each annotated with 3D bounding boxes and semantic labels. It also provides occupancy maps to support navigation and spatial understanding.
InteriorGS is the world’s first large-scale 3D dataset designed for free navigation of intelligent agents. It reconstructs scenes using 3D Gaussian Splatting technology and enriches them with semantic information using spatial foundation models. It offers a rich training resource to enhance the spatial perception capabilities of robots and AI agents. The dataset is openly available to developers worldwide via Hugging Face and GitHub.
Key Features of InteriorGS
-
Diverse Indoor Scenes:
Includes 1,000 3D scenes across 80+ types of indoor environments, such as homes, stores, banquet halls, and museums. -
Dense Object Annotations:
Features over 554,000 object instances from 755 categories, each annotated with 3D bounding boxes and semantic labels. -
Occupancy Maps:
Each scene includes occupancy maps to help agents understand spatial layouts, supporting path planning and obstacle avoidance. -
Dynamic Environment Support:
Enables intelligent agents to move freely within dynamic environments, enhancing adaptability and responsiveness. -
High-Quality Semantic Reconstruction:
Scenes are reconstructed using 3D Gaussian Splatting and enriched with semantic information, providing high-quality training data for AI models. -
Large-Scale Dataset:
As the first large-scale 3D dataset designed for agent-free navigation, it offers a comprehensive resource for model training.
Project Links for InteriorGS
-
GitHub Repository: https://github.com/manycore-research/InteriorGS
-
Hugging Face Dataset Page: https://huggingface.co/datasets/spatialverse/InteriorGS
Application Scenarios for InteriorGS
-
Indoor Navigation:
Robots can autonomously navigate complex indoor environments like homes, offices, and malls. The high-precision 3D scenes and occupancy maps in InteriorGS help robots perceive their surroundings, plan optimal paths, and avoid obstacles in real time. -
Spatial Perception Training:
The 3D scenes and occupancy data are ideal for training AI models to better understand spatial layouts and indoor structures. -
Virtual Environment Construction:
InteriorGS scenes can be used to build realistic virtual environments for VR and AR applications. -
Space Layout Optimization:
Architects and interior designers can leverage InteriorGS scenes and occupancy data to optimize indoor spatial layouts. -
Smart Device Deployment:
The dataset can help smart home systems understand interior environments and guide the strategic deployment of devices like smart cameras, sensors, and appliances.
© Copyright Notice
The copyright of the article belongs to the author. Please do not reprint without permission.
Related Posts

No comments yet...