Genie Envisioner – Zhiyuan’s Open-Source Robot World Model Platform
What is Genie Envisioner?
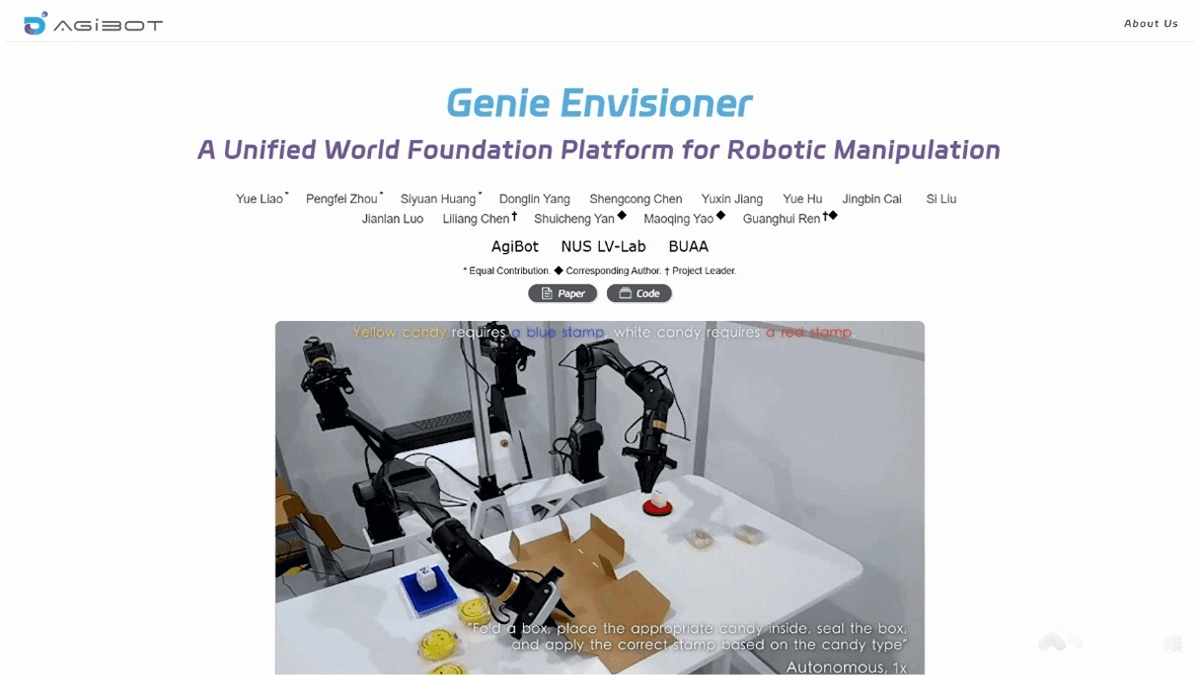
Genie Envisioner is the first open-source robot world model platform launched by Zhiyuan. The platform integrates policy learning, evaluation, and simulation through a unified video generation framework. Its core components include GE-Base (large-scale instruction-conditioned video diffusion model), GE-Act (action trajectory decoder), GE-Sim (neural simulator), and EWMBench (standardized benchmark suite). Genie Envisioner supports policy generalization across different robot morphologies, enabling precise operations in complex tasks, advancing embodied intelligence, and providing strong support for robotics research and applications.
Key Features of Genie Envisioner
-
Policy Learning: Captures robot-environment interactions via GE-Base and generates policies for action decision-making.
-
Action Generation: Maps latent representations into executable action trajectories, supporting multiple robot morphologies.
-
Simulation Support: Provides high-fidelity simulation environments for closed-loop policy testing and optimization.
-
Performance Evaluation: Offers standardized benchmarks to measure visual fidelity, physical consistency, and instruction-action alignment.
Technical Principles of Genie Envisioner
-
GE-Base: A large-scale instruction-conditioned video diffusion model that captures the spatial, temporal, and semantic dynamics of robot interactions. It represents complex robot interactions in a structured latent space for downstream processing.
-
GE-Act: A lightweight flow-matching decoder that maps latent space representations to executable action trajectories. Supports policy transfer across different robot morphologies with minimal supervision.
-
GE-Sim: An action-conditioned neural simulator for generating high-fidelity rollouts. Enables strategy development and optimization in virtual environments, reducing the need for physical experiments.
-
EWMBench: A standardized benchmark suite for evaluating visual fidelity, physical consistency, and instruction-action alignment, helping researchers and developers assess and optimize model performance.
Project Links
-
Official Website: https://genie-envisioner.github.io/
-
GitHub Repository: https://github.com/AgibotTech/Genie-Envisioner
-
arXiv Paper: https://arxiv.org/pdf/2508.05635
Application Scenarios
-
Industrial Automation: Assists robots in factories with precise execution of complex assembly, handling, and quality inspection tasks, improving production efficiency and product quality.
-
Logistics & Warehousing: Automates sorting and handling in logistics centers, enabling robots to quickly recognize and process items of varying shapes and sizes, optimizing workflow.
-
Service Robots: In restaurants, hotels, or home environments, enables robots to understand and execute human instructions, providing intelligent services such as food delivery, cleaning, and item transport.
-
Medical Assistance: Supports surgical assistance, rehabilitation training, or medicine delivery, enhancing precision and efficiency in healthcare services.
-
Education & Research: Provides universities and research institutions with a powerful experimental platform to advance research in robotics, AI, and embodied intelligence, driving technological development.
© Copyright Notice
The copyright of the article belongs to the author. Please do not reprint without permission.
Related Posts

No comments yet...