UnifoLM-WMA-0 – a world model action framework open-sourced by U-Tree Technology
What is UnifoLM-WMA-0?
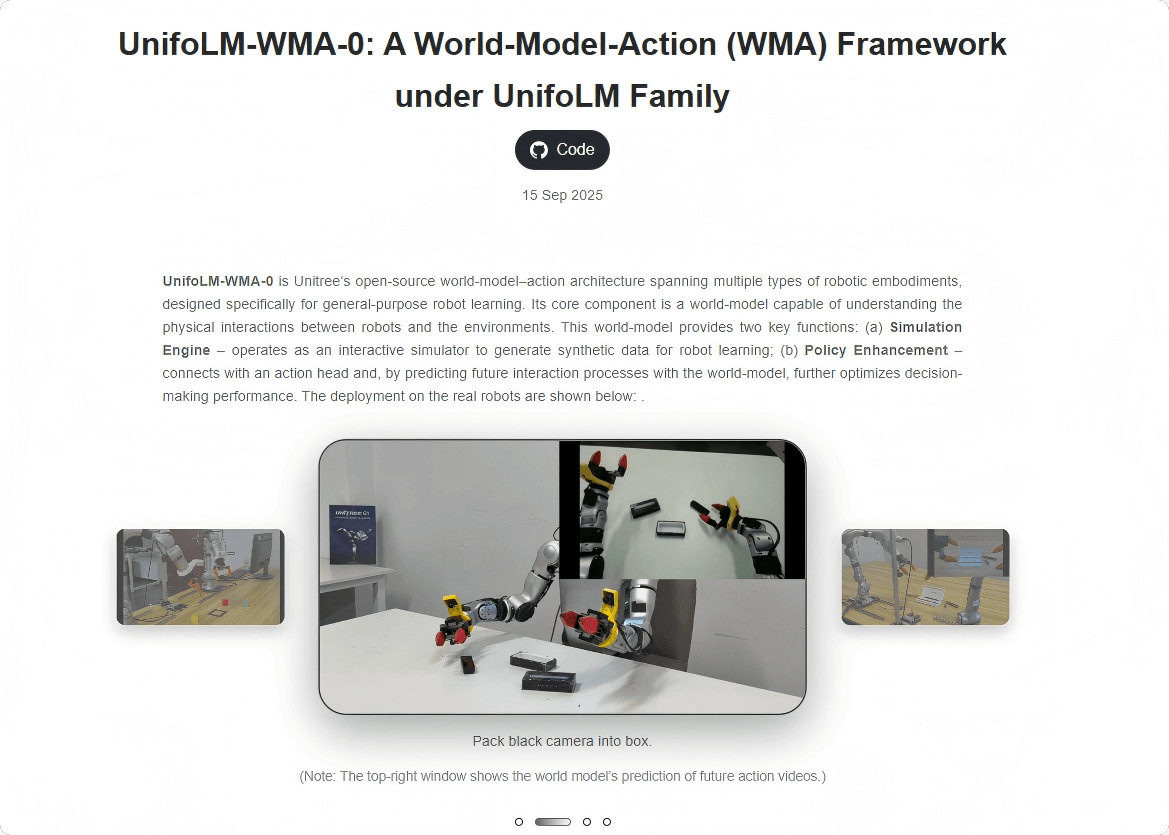
UnifoLM-WMA-0 is an open-source world model–action framework by U-Tree Technology, designed for general-purpose robot learning across multiple robot platforms. At its core is a world model capable of understanding the physical interactions between robots and their environment. The framework provides two main functions: a simulation engine and policy enhancement. The simulation engine generates synthetic data for robot learning, while policy enhancement optimizes decision-making by predicting future interactions. The architecture has been deployed on real robots, enabling controllable action generation and long-term interaction generation, thereby improving learning and decision-making capabilities in complex environments.
Key Features
-
Controllable action generation: Generates interaction-controllable videos based on current images and future robot actions, helping robots predict and plan movements.
-
Long-term interaction generation: Supports continuous interaction generation for long-horizon tasks, suitable for complex scenarios.
-
Policy enhancement: Optimizes decision-making by predicting future interactions, improving robot adaptability in complex environments.
-
Simulation engine: Produces synthetic data for robot learning and training, enhancing model generalization.
Technical Principles of UnifoLM-WMA-0
-
World Model: Captures environmental information via sensors (e.g., cameras), including current state and historical interactions. Deep learning models (e.g., Transformers or LSTMs) predict future environmental states, helping robots understand potential physical interactions and providing predictive input to decision modules for more effective action planning.
-
Decision Module: Generates optimal policies based on predictions from the world model, converting strategies into concrete robot actions to efficiently complete tasks.
-
Simulation Engine: Uses simulation to generate large amounts of synthetic data for training the world model and decision module, providing high-fidelity environmental feedback to improve real-world adaptability.
-
Fine-tuned Video Generation Model: Fine-tuned on robot-specific datasets (e.g., Open-X) to generate videos corresponding to commanded future actions. Based on current images and future action instructions, it produces interaction-controllable videos to assist robots in prediction and planning.
Project Links
-
Official site: https://unigen-x.github.io/unifolm-world-model-action.github.io/
-
GitHub repository: https://github.com/unitreerobotics/unifolm-world-model-action
Application Scenarios for UnifoLM-WMA-0
-
Smart manufacturing: Helps robots predict equipment states, optimize operations, and improve production efficiency.
-
Cargo handling: In logistics warehouses, robots can predict environmental changes (e.g., positions of other robots or dynamic movement of goods) to optimize path planning.
-
Inventory management: Through long-term interaction generation, robots can manage inventory more efficiently and optimize restocking strategies.
-
Hotel services: Service robots can provide tasks such as room delivery or cleaning, optimizing service workflows.
-
Home assistance: Robots can perform household chores such as cleaning or cooking, providing personalized services.
© Copyright Notice
The copyright of the article belongs to the author. Please do not reprint without permission.
Related Posts


No comments yet...