InternVLA-A1 – Embodied Manipulation Large Model Open-Sourced by Shanghai AI Laboratory
What is InternVLA-A1?
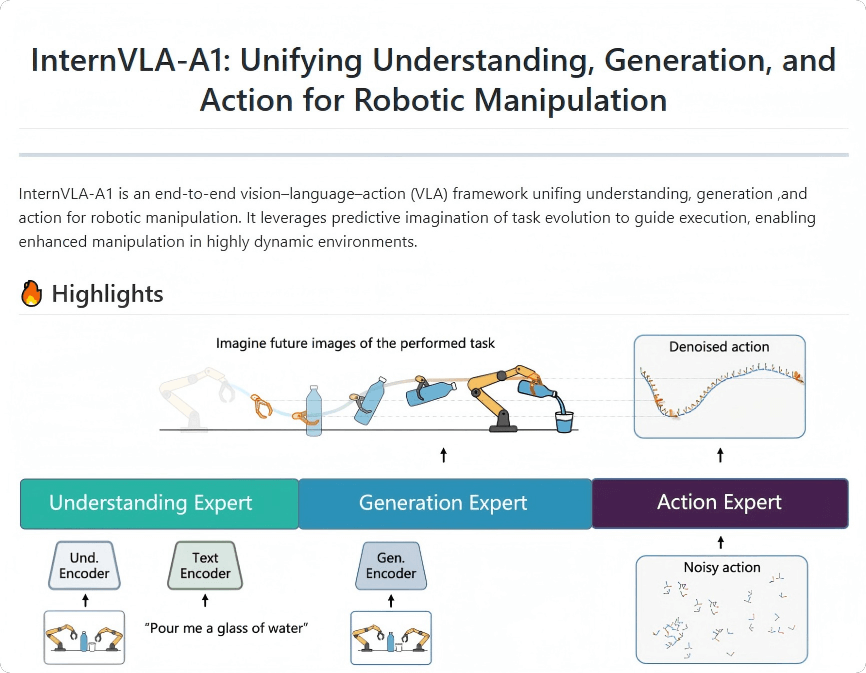
InternVLA-A1 is an embodied manipulation large model jointly released by the Shanghai Artificial Intelligence Laboratory and the National-Local Joint Innovation Center for Humanoid Robots. It integrates the abilities to understand, imagine, and execute tasks with high precision. The model combines both real-world and simulated operational data, automatically generating a massive multimodal dataset through large-scale virtual-real hybrid scene assets, reaching a total of 6 million data entries. Its “one brain, multiple bodies” feature allows it to support multiple robot platforms, enabling zero-shot generalization across different scenarios and robotic embodiments. InternVLA-A1 performs exceptionally well in highly dynamic environments, demonstrating strong adaptability and stable dynamic interactions. Its performance in real-world evaluations significantly surpasses that of similar models. InternVLA-A1 has been open-sourced, providing researchers and developers with rich data resources to advance humanoid robotics technology.
Main Features of InternVLA-A1
-
Understanding & Imagination: Accurately interprets scenes and task requirements, planning feasible operation paths and steps through imagination, providing a clear blueprint for subsequent execution.
-
Precise Execution: Based on understanding, the model can precisely control robots to perform various manipulation tasks such as grasping, transporting, and assembling, ensuring task accuracy.
-
Virtual-Real Fusion: Combines real and simulated operational data to build large-scale hybrid scene assets, enhancing performance in both virtual and real-world environments, improving generalization and adaptability.
-
Multi-Robot Collaboration: Supports coordinated tasks among multiple robots, intelligently allocating tasks according to requirements for efficient teamwork, suitable for complex multi-robot operations.
-
Cross-Platform Adaptation: With its “one brain, multiple bodies” design, it supports various robot platforms, such as Ark Infinity, Guodi Qinglong humanoid robots, and Zhiyuan Genie, offering broad compatibility and versatility.
-
Dynamic Interaction: Excels in high-dynamic scenarios, perceiving environmental changes in real time and responding quickly, enabling stable dynamic interactions in complex and changing real-world settings.
Technical Principles of InternVLA-A1
-
Multimodal Data Fusion: Integrates real-world data, simulation data, textual descriptions, and other data types to create a large-scale multimodal dataset, providing rich corpus support for model training.
-
Virtual-Real Hybrid Training: Uses hybrid datasets combining simulation data from virtual environments and real-world captured data, enabling effective learning and optimization in both virtual and real scenarios to enhance generalization.
-
Self-Supervised Learning: Employs self-supervised methods to allow the model to learn inherent structures and features of data without labeled samples, improving understanding and adaptability in complex scenarios.
-
Reinforcement Learning Optimization: Uses reinforcement learning to optimize behavioral strategies through interaction with the environment, allowing continuous improvement in real-world operations for better execution results.
-
Cross-Modal Understanding & Generation: Capable of understanding and generating across visual, language, and action modalities, effectively integrating and converting information to better comprehend task requirements and generate corresponding operational commands.
-
Dynamic Adaptation & Interaction: Possesses dynamic adaptation abilities, perceiving environmental changes in real time and responding promptly for stable interaction, especially excelling in high-dynamic scenarios to ensure smooth task execution.
Project Links
-
GitHub Repository: https://github.com/InternRobotics/InternVLA-A1
-
HuggingFace Dataset: https://huggingface.co/datasets/InternRobotics/InternData-A1
Application Scenarios of InternVLA-A1
-
Home Services: Assists with household chores, such as organizing items, cleaning, and caring for elderly or children, improving convenience and comfort in daily life.
-
Industrial Manufacturing: Performs tasks on production lines like parts assembly, material handling, and quality inspection, enhancing production efficiency and product quality.
-
Logistics & Warehousing: Executes sorting, transporting, and stacking tasks in warehouses and logistics centers, optimizing workflows and reducing labor costs.
-
Medical & Caregiving: Supports healthcare staff in patient care, rehabilitation assistance, and moving medical equipment, reducing the workload of caregivers.
-
Public Services: Provides information guidance, cleaning, and maintenance in public spaces like airports, stations, and shopping malls, improving service quality and efficiency.
-
Education & Research: Serves as a research tool for experiment operations and data collection; in education, acts as a teaching assistant, supporting instructional activities and stimulating student interest.
© Copyright Notice
The copyright of the article belongs to the author. Please do not reprint without permission.
Related Posts

No comments yet...